





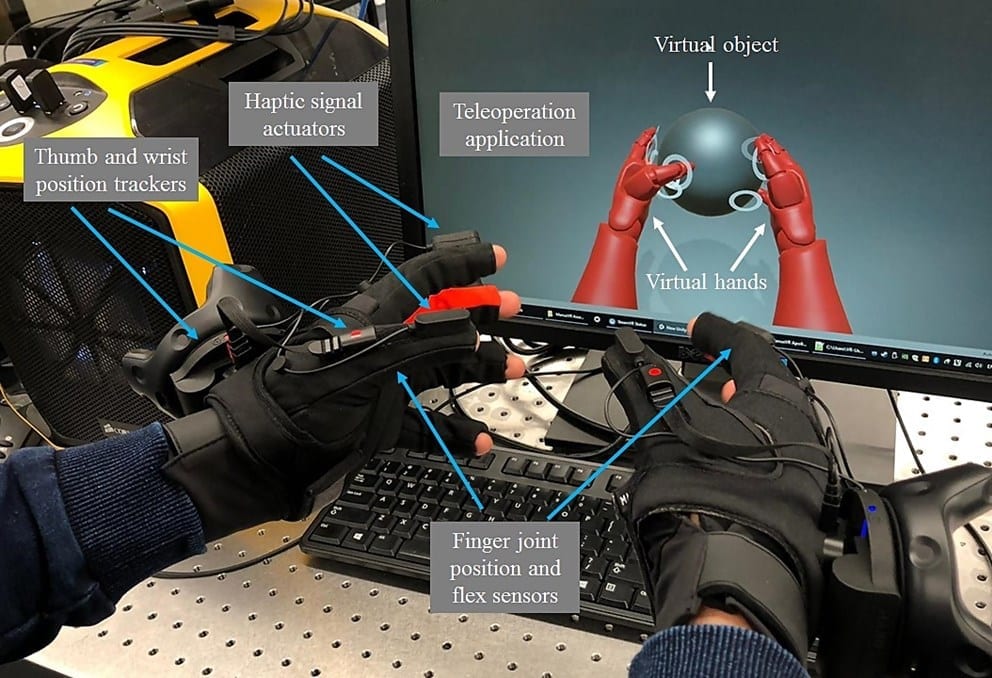
Caption: Experimental setup demonstrating human-to-maching applications.
Credit: S. Mondal, et al., The University of Melbourne
The Latest Updates from Bing News & Google News
Go deeper with Bing News on:
Predictive touch response
- Utilities need to get serious about data
The time is now for utilities to activate reliable data strategies, and aggressively hold each other accountable for progress.
- Braze Blazes Ahead
B ill Magnuson is the chairman, CEO, and co-founder of Braze, a customer engagement platform that works with some of business's biggest names. In this podcast, Motley Fool analyst Tim Beyers caught up ...
- Apple addresses predictive emoji ‘bug’ in latest iOS 17.5 beta after outrage
Apple quickly responded by declaring the emoji was the result of an iOS 17.4.1 bug that affected predictive text. It’s unclear what caused the bug or if other words were affected as well ...
- Clinical tool predicts adoptive therapy response in eye cancer patients
New predictive tool sheds light on immunotherapy-resistant metastatic uveal melanoma and how adoptive therapy can successfully be used to treat the cancer.
- Unlocking the Voice of Customer With AI
Leveraging Natural Language Processing (NLP), sentiment analysis and predictive analytics ... allowing businesses to respond appropriately to customer needs and market demands.
Go deeper with Google Headlines on:
Predictive touch response
[google_news title=”” keyword=”predictive touch response” num_posts=”5″ blurb_length=”0″ show_thumb=”left”]
Go deeper with Bing News on:
Tactile internet
- Shades of Style: My Journey to the Perfect iPhone 15 Pro Max Case
With a teardrop shell of striking Bondi Blue-and-white plastic, the 1998 iMac G3 was the future-- streamlined, stylized and ready for something brand-new to our house called the internet ... in time ...
- Best Buy Slashes Prices On The iPad And iPad Mini
Before we start, are you seated? Okay good, because Best Buy just rolled out two really good discounts on the 9th Gen iPad and the 6th Gen iPad Mini. In a limited-time offer only, the models are $100 ...
- Rise of the tiger: Indian art surges while Chinese antiquities hold firm in Asia Week auctions
China’s art market remains far larger and more extensive than India’s, but the Indian results highlight the country’s growing wealth and confidence.
- 'Internet resistant' stores can help stabilize Tucson's retail market
With the exodus of some big retailers from Tucson last year, many formerly known “shopping centers” are being transformed into destination centers.
- The Best Cases For Motorola’s Moto G 5G (2024)
We scour the internet for anything resembling a compatible case for the Moto G 5G (2024)!
Go deeper with Google Headlines on:
Tactile internet
[google_news title=”” keyword=”tactile internet” num_posts=”5″ blurb_length=”0″ show_thumb=”left”]

{kind=link}