




Image courtesy of Ryan L. Truby/Harvard University
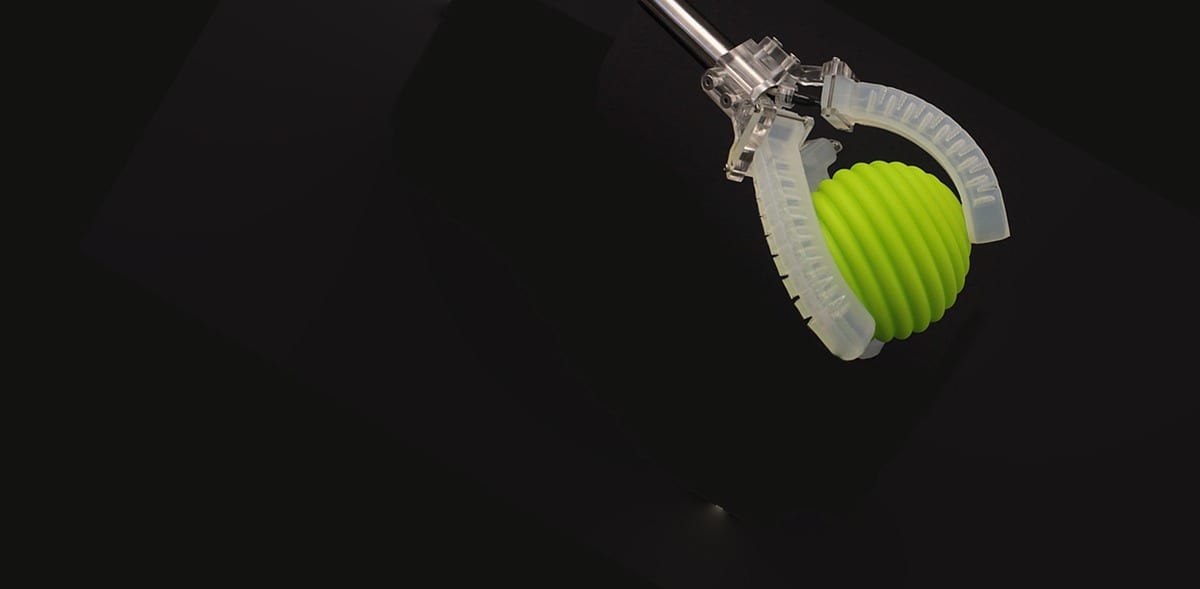
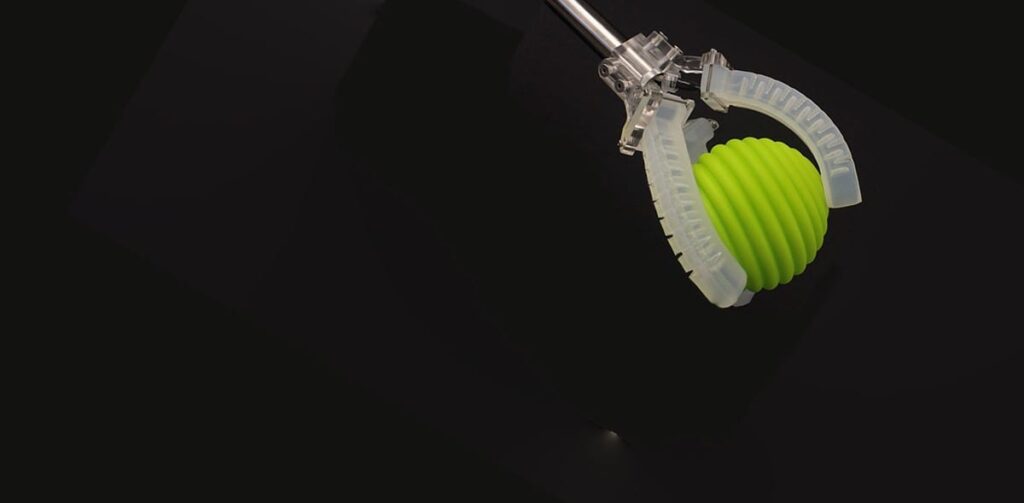
Researchers at Harvard University have built soft robots inspired by nature that can crawl, swim, grasp delicate objects and even assist a beating heart, but none of these devices has been able to sense and respond to the world around them.
Inspired by our bodies’ sensory capabilities, researchers at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) and the Wyss Institute for Biologically Inspired Engineering have developed a platform for creating soft robots with embedded sensors that can sense movement, pressure, touch, and even temperature.
“Our research represents a foundational advance in soft robotics,” said Ryan Truby, first author of the paper and recent Ph.D. graduate at SEAS. “Our manufacturing platform enables complex sensing motifs to be easily integrated into soft robotic systems.”
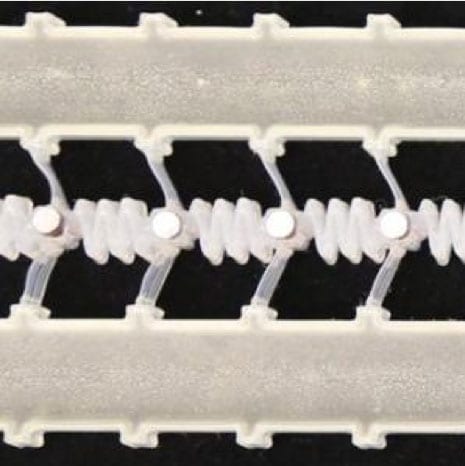
Integrating sensors within soft robots has been difficult in part because most sensors, such as those used in traditional electronics, are rigid. To address this challenge, the researchers developed an organic ionic liquid-based conductive ink that can be 3D printed within the soft elastomer matrices that comprise most soft robots.
The technique — known as embedded 3D printing — seamlessly and quickly integrates multiple features and materials within a single soft body.
“To date, most integrated sensor/actuator systems used in soft robotics have been quite rudimentary,” said Michael Wehner, former postdoctoral fellow at SEAS and co-author of the paper. “By directly printing ionic liquid sensors within these soft systems, we open new avenues to device design and fabrication that will ultimately allow true closed loop control of soft robots.”
“The function and design flexibility of this method is unparalleled,” said Truby. “This new ink combined with our embedded 3D printing process allows us to combine both soft sensing and actuation in one integrated soft robotic system.”
“Soft robotics are typically limited by conventional molding techniques that constrain geometry choices, or, in the case of commercial 3D printing, material selection that hampers design choices,” said Robert Wood, the Charles River Professor of Engineering and Applied Sciences at SEAS, Core Faculty Member of the Wyss Institute, and co-author of the paper. “The techniques developed in the Lewis Lab have the opportunity to revolutionize how robots are created — moving away from sequential processes and creating complex and monolithic robots with embedded sensors and actuators.”
Next, the researchers hope to harness the power of machine learning to train these devices to grasp objects of varying size, shape, surface texture, and temperature.
The Latest on: Embedded 3D printing
[google_news title=”” keyword=”Embedded 3D printing” num_posts=”10″ blurb_length=”0″ show_thumb=”left”]
via Google News
The Latest on: Embedded 3D printing
- HAX cuts ribbon on US headquarters in Newark (photos)on May 1, 2024 at 1:09 pm
Sean and Duncan and colleagues could have planted the HAX flag literally anywhere in the world – and they choose Newark, New Jersey,” Gov. Phil Murphy said during a celebration of the space. “I think ...
- Local businesses still offering Derby hats ahead of Kentucky Derby 150on April 30, 2024 at 3:20 pm
The second apron is a new, additional threshold, slated as roughly $11 million ($190 million total) above the first apron for the 2024-25 league season. It will handicap team decision-makers more than ...
- Arduino at Automate 2024: Empowering a New Generation of Engineers with Industrial IoTon April 29, 2024 at 5:06 am
Arduino lowers barriers with open source in IIoT innovation. Discover the versatile Opta micro-PLC and new advanced training solutions.
- I’ve been waiting for a 3D printer like the Anycubic Kobra 3 Comboon April 28, 2024 at 1:00 pm
Anycubic's new 3D printer solves a lot of problems for beginners, and has new exclusive Pantone filament colours.
- Dentist Shocked To Find Ancient Human Jawbone Stuck In Home Floor Tileon April 28, 2024 at 12:54 pm
A dentist shared photos on Reddit of a stunning surprise: a human mandible embedded in his parents' new floor. The post grabbed attention, and now scientists are stepping in.
- World’s largest 3D printer can print a house in under 80 hourson April 26, 2024 at 10:56 am
The University of Maine has unveiled the world's largest 3D printer, a machine capable of printing a house in 80 hours of less.
- Films you can feel: How 4DX went from silly gimmick to the saviour of cinemaon April 26, 2024 at 10:00 am
I am sitting in the 4DX cinema at the O2 in Greenwich, south east London, surrounded by a rig of concealed pistons and flanges. And if you have yet to experience a film in 4DX – “watch” feels like the ...
- Researchers Develop System to Detect and Sanitize Steganography in 3D Modelson April 25, 2024 at 9:43 am
“Steganography is the practice of representing information within another message or physical object, in such a manner that the presence of the information is not evident to human inspection. In ...
- From Runway to Retail: How Technology is Revolutionizing Fashionon April 24, 2024 at 9:34 am
Step into the world where innovation meets style, where high fashion seamlessly integrates with cutting-edge technology. Join us as we explore how the fusion of runway and retail is transforming the ...
- Tackling The Fear, Uncertainty And Doubt That Limit Manufacturingon April 23, 2024 at 5:30 am
By embracing transparency, leveraging technology and reimagining our approaches, we can unlock a new era of efficiency, innovation and growth in manufacturing.
via Bing News

{kind=link}