





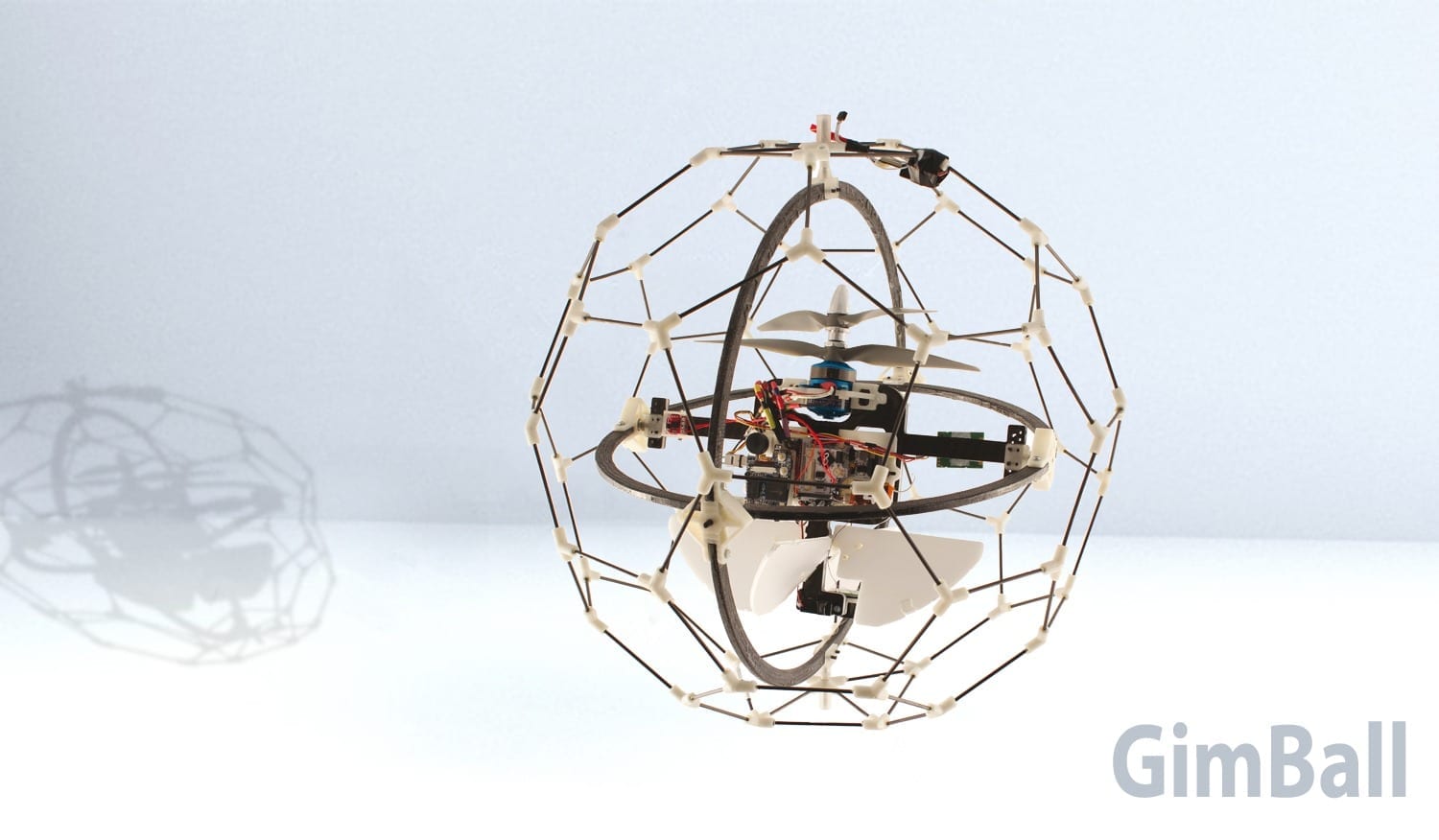
GimBall and the AirBurr, are robots designed specifically to study the physical interaction between flying robots and their environment.
Robots capable of flight in cramped and cluttered environments have many advantages over their ground-based counterparts, but most current systems suffer from the same fundamental problem: any contact with obstacles has catastrophic, mission-ending results. What if instead of avoiding collisions, a flying robot can become robust to them, and even take advantage of contact with its environment?
GimBall and the AirBurr, are robots designed specifically to study the physical interaction between flying robots and their environment.
GimBall is equipped with a passively rotating protective cage, which keeps it stable even during collisions. It can therefore fly in very cluttered environments without fearing contacts.
The AirBurr v11 is now able to detect obstacles thanks to contact sensors integrated in its structure. Together with accelerometers, these sensors allow the AirBurr to learn from collisions and change direction once it meets an obstacle. In this video, it flies fully autonomously in a small room and explores the entire 3D space with touch sensors as only exteroceptive sensor (no distance or height sensor is used). These latest results will be presented in November at
Go deeper with Bing News on:
Flying robots
- TU Munich: Robots and drones to monitor and clean the environment
Researchers at the Technical University of Munich have set themselves the goal of cleaning the environment with robots and drones. This is done remotely.
- Xpeng’s flying car affiliate AeroHT closes in on airworthiness certification as Chinese EV maker targets fourth-quarter presales
AeroHT, an affiliate of Chinese electric vehicle maker Xpeng, has started the countdown for the commercialisation of its flying car and plans to start taking pre-orders in the fourth quarter of this ...
- Flying ‘AirCar’ Has 1st Passenger
It seems like we’ve been waiting forever to be able to go from freeway to the skies in a flying car. Slovakian company Klein Vision has been working on their AirCar to fulfill that desire.
- Testing Novel 3D Mapping Technology to Transform Space Exploration and Benefit Industries on Earth
The project, a collaboration between Boeing and CSIRO (an Australian government agency responsible for scientific research), highlights the importance of international partnerships while building on ...
- What's The 'Wow Cool Robot' Meme? The 'Mobile Suit Gundam' Satire Drawing Explained
The Gundam anime series is not just about flashy and cool robot fights. Here's why this exploitable meme became a viral satire about people who miss some subtext in certain pieces of media.
Go deeper with Google Headlines on:
Flying robots
[google_news title=”” keyword=”flying robots” num_posts=”5″ blurb_length=”0″ show_thumb=”left”]
Go deeper with Bing News on:
Autonomous flying robots
- TU Munich: Robots and drones to monitor and clean the environment
Researchers at the Technical University of Munich have set themselves the goal of cleaning the environment with robots and drones. This is done remotely.
- China Green-Lights Mass Production of Autonomous Flying Taxis
China green-lights mass production of autonomous flying taxis. EHang got its first certification and plans to release the first one in 2035.
- China Says It Will Have Autonomous Flying Taxis Cruising Around Its Skies In 2025
China has officially approved the mass production of autonomous flying taxis and says commercial flights will begin in the year 2025. Now, we have heard ...
- This Marine colonel went from flying fighter jets to exploring space
As a child growing up in Northern California, Marine Col. Nicole Mann would look at the stars and wonder if she could ever explore them herself.
- China green-lights mass production of autonomous flying taxis — with commercial flights set for 2025
The EHang EH216-S autonomous flying taxi is the first eVTOL ready for mass production and could lead the way for flying cars around the world.
Go deeper with Google Headlines on:
Autonomous flying robots
[google_news title=”” keyword=”autonomous flying robots” num_posts=”5″ blurb_length=”0″ show_thumb=”left”]



{kind=link}