





Bots from the MIT Computer Science and Artificial Intelligence Lab work together more effectively in the face of uncertainty.
If companies like Amazon and Google have their way, soon enough we will have robots air-dropping supplies from the sky. But is our software where it needs to be to move and deliver goods in the real world?
This question has been explored for many years by researchers at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL), who have worked on scenarios inspired by domains ranging from factory floors to drone delivery.
At the recent Robotics Science and Systems (RSS) conference, a CSAIL team presented a new system of three robots that can work together to deliver items quickly, accurately and, perhaps most importantly, in unpredictable environments. The team says its models could extend to a variety of other applications, including hospitals, disaster situations, and even restaurants and bars.
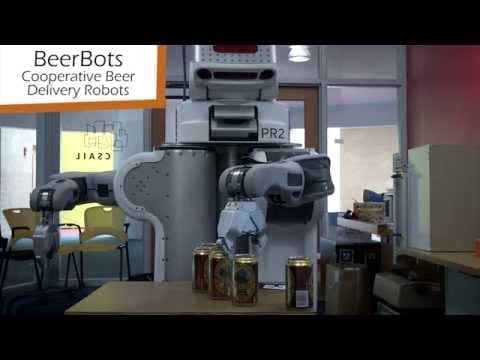
To demonstrate their approach, the CSAIL researchers converted their lab into a miniature “bar” that included a PR2 robot “bartender” and two four-wheeled Turtlebot robots that would go into the different offices and ask the human participants for drink orders. The Turtlebots then reasoned about which orders were required in the different rooms and when other robots may have delivered drinks, in order to search most efficiently for new orders and deliver the items to the spaces.
The team’s techniques reflect state-of-the-art planning algorithms that allow groups of robots to perform tasks given little more than a high-level description of the general problem to be solved.
The RSS paper, which was named a Best Paper Finalist, was co-authored by Duke University professor and former CSAIL postdoc George Konidaris, MIT graduate students Ariel Anders and Gabriel Cruz, MIT professors Jonathan How and Leslie Kaelbling, and lead author Chris Amato, a former CSAIL postdoc who is now a professor at the University of New Hampshire.
Humanity’s one certainty: uncertainty
One of the big challenges in getting robots to work together is the fact that the human world is full of so much uncertainty.
More specifically, robots deal with three kinds of uncertainty, related to sensors, outcomes, and communications.
“Each robot’s sensors get less-than-perfect information about the location and status of both themselves and the things around them,” Amato says. “As for outcomes, a robot may drop items when trying to pick them up or take longer than expected to navigate. And, on top of that, robots often are not able to communicate with one another, either because of communication noise or because they are out of range.”
These uncertainties were reflected in the team’s delivery task: among other things, the supply robot could serve only one waiter robot at a time, and the robots were unable to communicate with one another unless they were in close proximity. Communication difficulties such as this are a particular risk in disaster-relief or battlefield scenarios.
“These limitations mean that the robots don’t know what the other robots are doing or what the other orders are,” Anders says. “It forced us to work on more complex planning algorithms that allow the robots to engage in higher-level reasoning about their location, status, and behavior.”
Making the micro more macro
The researchers were ultimately able to develop the first planning approach to demonstrate optimized solutions for all three types of uncertainty.

Read more: Robots collaborate to deliver meds, supplies, and even drinks
The Latest on: Collaborating robots
[google_news title=”” keyword=”Collaborating robots” num_posts=”10″ blurb_length=”0″ show_thumb=”left”]
via Google News
The Latest on: Collaborating robots
- Robots cannot outrun animals, but they’re evolving fasteron April 26, 2024 at 11:30 am
Despite these efforts, today's robots still cannot match the natural abilities of many animals in terms of endurance ...
- J.Lo vs. Giant Robots? J.Lo vs. Giant Robots! Everything We Know About Netflix's 'Atlas'on April 26, 2024 at 11:00 am
Here's what we know about Jennifer Lopez's sci-fi action adventure flick Atlas, which is heading to Netflix soon.
- Health Headlines: Robot therapy dogs bringing smiles to children’s faceson April 26, 2024 at 9:52 am
STANFORD, Calif. (Ivanhoe Newswire) - A recent peer-reviewed study indicates that children who spend time with therapy dogs can lower their stress even more than relaxation exercises. That outcome ...
- Automated machine learning robot unlocks new potential for genetics researchon April 26, 2024 at 9:10 am
University of Minnesota Twin Cities researchers have constructed a robot that uses machine learning to fully automate a complicated microinjection process used in genetic research.
- AI to Power the Next Generation of Robotson April 26, 2024 at 4:22 am
There's increasing buzz that the tech behind ChatGPT will make future industrial and humanoid robots far more capable.
- Europe taps deep learning to make industrial robots safer colleagueson April 26, 2024 at 1:07 am
European researchers have launched the RoboSAPIENS project to make adaptive industrial robots more efficient and safer to work with humans.
- Universal Robots Announces Seamless Integration with Siemens PLCson April 25, 2024 at 9:36 am
The company accelerates its commitment to “Automation for Anyone, Anywhere” by supporting the automation requirements of global companies.
- Universal Robots integrates cobots with Siemens PLCson April 25, 2024 at 6:39 am
Universal Robots says the SRCI is available for its e-Series family of cobots and next-generation robots, the UR20 and UR30.
- Elite Robots to Showcase an Enriched Range of All-in-one Solutions and Collaborative Robots at Automate 2024on April 25, 2024 at 5:01 am
Elite Robots, a leading supplier of collaborative robots, will exhibit its enriched range of cobots and all-in-one solutions at the upcoming Automate Show (May 6-9, Chicago), at booth 4255. This press ...
- Industrial Robots and Their Human Counterpartson April 23, 2024 at 8:35 am
The conversation around robots and their use in manufacturing has long been controversial. Many fear that the introduction of robots into the workplace will displace human jobs. In some respects, yes, ...
via Bing News

{kind=link}