






Video: Melanie Gonick/MIT
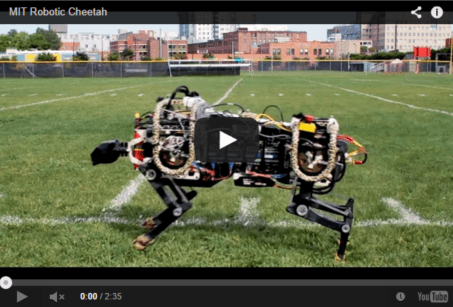
New algorithm enables MIT cheetah robot to run and jump, untethered, across grass.
Speed and agility are hallmarks of the cheetah: The big predator is the fastest land animal on Earth, able to accelerate to 60 mph in just a few seconds. As it ramps up to top speed, a cheetah pumps its legs in tandem, bounding until it reaches a full gallop.
Now MIT researchers have developed an algorithm for bounding that they’ve successfully implemented in a robotic cheetah — a sleek, four-legged assemblage of gears, batteries, and electric motors that weighs about as much as its feline counterpart. The team recently took the robot for a test run on MIT’s Killian Court, where it bounded across the grass at a steady clip.
In experiments on an indoor track, the robot sprinted up to 10 mph, even continuing to run after clearing a hurdle. The MIT researchers estimate that the current version of the robot may eventually reach speeds of up to 30 mph.
The key to the bounding algorithm is in programming each of the robot’s legs to exert a certain amount of force in the split second during which it hits the ground, in order to maintain a given speed: In general, the faster the desired speed, the more force must be applied to propel the robot forward. Sangbae Kim, an associate professor of mechanical engineering at MIT, hypothesizes that this force-control approach to robotic running is similar, in principle, to the way world-class sprinters race.
“Many sprinters, like Usain Bolt, don’t cycle their legs really fast,” Kim says. “They actually increase their stride length by pushing downward harder and increasing their ground force, so they can fly more while keeping the same frequency.”
Kim says that by adapting a force-based approach, the cheetah-bot is able to handle rougher terrain, such as bounding across a grassy field. In treadmill experiments, the team found that the robot handled slight bumps in its path, maintaining its speed even as it ran over a foam obstacle.
“Most robots are sluggish and heavy, and thus they cannot control force in high-speed situations,” Kim says. “That’s what makes the MIT cheetah so special: You can actually control the force profile for a very short period of time, followed by a hefty impact with the ground, which makes it more stable, agile, and dynamic.”
The Latest on: Running robot
[google_news title=”” keyword=”Running robot” num_posts=”10″ blurb_length=”0″ show_thumb=”left”]
via Google News

The Latest on: Running robot
- Chinese company unveils humanoid running robot with large-scale commercial potentialon April 27, 2024 at 7:00 am
Tiangong, a humanoid robot described as the world's first full-sized humanoid robot capable of running solely on electric drive, was unveiled in the Beijing Economic-Technological Development Area on ...
- China unveils “Tiangong”: First fully electric humanoid robot capable of running at 6 km/hon April 27, 2024 at 5:10 am
China's Beijing Humanoid Robot Innovation Center unveils "Tiangong," a robot capable of human-like running at 6 km/h.
- I found the most powerful robot vacuum on the market, and it's cheaper than you'd thinkon April 27, 2024 at 5:00 am
The Yeedi performs like a high-end, two-in-one robot, with 11,000Pa of suction power, roller brush technology to prevent hair tangles, and a self-washing station. Unfortunately, I had to make virtual ...
- The best robot lawn mowers to buy in 2024, according to reviewson April 26, 2024 at 3:00 pm
These are some of the top robot lawn mowers that can cut your grass all season long, including models from Worx and Greenworks.
- Robots cannot outrun animals, but they’re evolving fasteron April 26, 2024 at 11:30 am
Despite these efforts, today's robots still cannot match the natural abilities of many animals in terms of endurance ...
- Last chance to get a Sam's Club membership for $14, the lowest price of 2024on April 26, 2024 at 10:25 am
Sam's Club offers the most affordable warehouse membership. While there are different benefits to every warehouse store, Sam's Club offers the lowest yearly membership fee. You won't be able to beat ...
- Robot Speaker at Commencement? Some Human Students Balkon April 26, 2024 at 12:48 am
Enter Sophia, a humanoid robot first launched in 2016 from Houston-based Hansen Robotics. The Buffalo university announced Wednesday it would bring Sophia to speak at its May 11 commencement ceremony.
- Please don’t spend $10K on this flamethrowing robot dogon April 25, 2024 at 7:38 am
Throwflame says the robot dog has around an hour of battery life, and the flamethrower on top can run for around 45 minutes. That’s a lot of barely controlled chaos in the hands of anyone with $10K to ...
- Evolution vs. Engineering: Why Can’t Robots Outrun Animals?on April 24, 2024 at 11:00 am
Despite superior individual components, robots lag behind animals in overall performance, suggesting a future focus on better system integration and control in robotics. Robotics engineers have worked ...
- Why animals run faster than their robot doppelgängers… for nowon April 24, 2024 at 11:00 am
“It [advances in robots] will move faster, because evolution is undirected,” University of Washington Department of Electrical & Computer Engineering Associate Professor Sam Burden said. “There are ...
via Bing News

{kind=link}