






Eliseo Ferrante and colleagues evolved complex robot behaviors using artificial evolution and detailed robotics simulations.
Darwinian selection can be used to evolve robot controllers able to efficiently self-organize their tasks. Taking inspiration from the way in which ants organize their work and divide up tasks, researchers evolved complex robot behaviors using artificial evolution and detailed robotics simulations.
Darwinian selection can be used to evolve robot controllers able to efficiently self-organize their tasks. Taking inspiration from the way in which ants organise their work and divide up tasks, Eliseo Ferrante and colleagues evolved complex robot behaviors using artificial evolution and detailed robotics simulations.
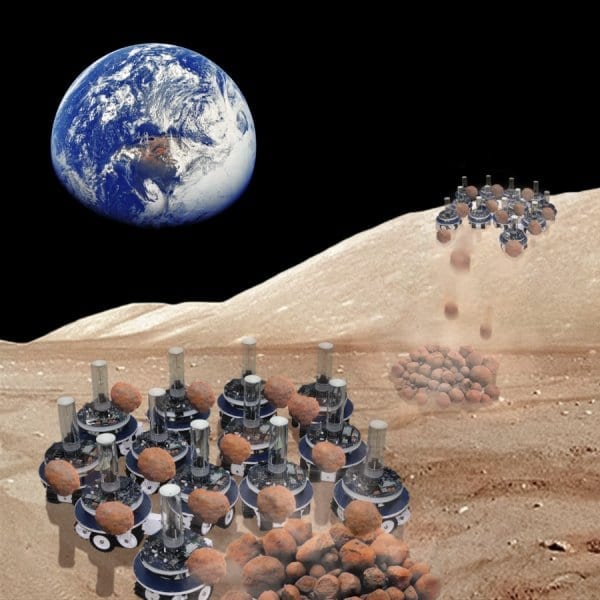
Just like social insects such as ants, bees or termites teams of robots display a self-organized division of labor in which the different robots automatically specialized into carrying out different subtasks in the group, says new research publishing in PLOS Computational Biology.
The field of ‘swarm robotics‘ aims to use teams of small robots to explore complex environments, such as the moon or foreign planets. However, designing controllers that allow the robots to effectively organize themselves is no easy task.
Read more: Artificially evolved robots that efficiently self-organize tasks
The Latest on: Evolutionary robotics
[google_news title=”” keyword=”Evolutionary robotics” num_posts=”10″ blurb_length=”0″ show_thumb=”left”]
via Google News

The Latest on: Evolutionary robotics
- Understanding Why Current Robots Are Slower Than Nature’s Speedsters: Insights from ScienceAlerton May 5, 2024 at 2:15 pm
A recent study examining the interplay between robotic capabilities and animalistic prowess sheds light on this phenomenon. Drawing from an analysis of over a hundred prior studies, the researchers ...
- From Robots to AI: Understanding the Uncanny Valley in Digital Innovationon May 2, 2024 at 6:03 am
As technology and AI continue to advance, pushing the boundaries of realism, it becomes crucial to understand where this phenomenon can have a negative impact.
- Interview: Suzanne Gildert leaves Sanctuary to focus on AI consciousnesson April 30, 2024 at 2:26 am
Earlier this month, co-founder and CTO Suzanne Gildert left humanoid robotics company Sanctuary AI and her beloved Phoenix robot to focus full-time on AI safety, ethics and consciousness. We spoke to ...
- The Evolution Of Cryptocurrency Trading: Insights From An Australian Crypto Exchange Robotics & Automation Newson April 29, 2024 at 12:31 pm
Australia was one of the early adopters of cryptocurrency after the introduction of Bitcoin in 2009. According to a survey by Statista in ...
- Evolutionary Biology Newson April 22, 2024 at 4:59 pm
May 3, 2024 — Land plants cover the surface of our planet and often tower over us. They form complex bodies with multiple organs that consist of a broad range of cell types. Developing this ...
- Two lifeforms merge in once-in-a-billion-years evolutionary eventon April 17, 2024 at 9:43 pm
Last time this happened, Earth got plants. Scientists have caught a once-in-a-billion-years evolutionary event in progress, as two lifeforms have merged into one organism that boasts abilities its ...
- How interspecies competition led to a 'bizarre' pattern in our own evolutionary treeon April 16, 2024 at 5:01 pm
Competition between species played a major role in the rise and fall of hominins—and produced a "bizarre" evolutionary pattern for the Homo lineage—according to a new University of Cambridge ...
- How LLMs are ushering in a new era of roboticson April 16, 2024 at 5:01 pm
Find out how you can attend here. Recent months have seen a growing number of projects that use large language models (LLMs) to create robotics applications that seemed impossible before.
- MIT Technology Reviewon April 10, 2024 at 5:00 pm
Henry got a glimmer of a different kind of life when he saw Charlie Kemp on CNN in 2010. Kemp, a robotics professor at Georgia Tech, was on TV talking about PR2, a robot developed by the company ...
- Evolutionary Psychologyon March 23, 2024 at 11:51 am
So, too, did the human brain. Evolutionary psychology is the study of the ways in which the mind was shaped by pressures to survive and reproduce. Findings in this field often shed light on ...
via Bing News


{kind=link}