





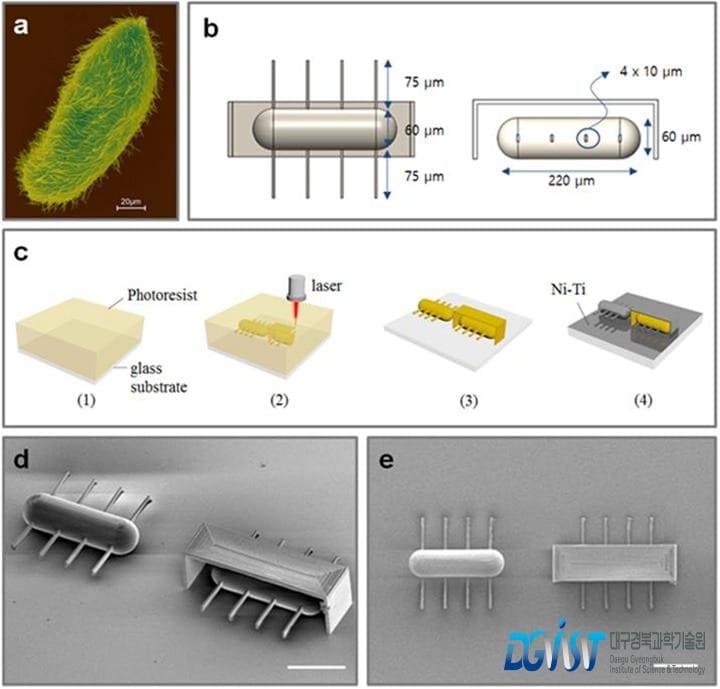
b) Design layouts for artificial ciliary microrobots.
c) Overall fabrication process for the ciliary microrobot using 3D laser lithography and metal sputtering.
d) SEM image of ciliary stroke motion microrobots developed by Prof. Choi’s research team (3D view, scale bar = 100 ?m)
e) SEM image of ciliary stroke motion microrobots developed by Prof. Choi’s research team (top view, scale bar = 100 ?m)
A research team led by Professor Hongsoo Choi developed microrobots with high propulsion efficiency in highly-viscous fluid environments, applying propulsion techniques that mimic the ciliary stroke motion of paramecia.
The research team at DGIST developed ciliary microrobots with high propulsion efficiency in highly-viscous fluid environments in the human body such as blood by mimicking the movement of paramecia’s cilia. The ciliary microrobots are for chemical and cell delivery that can be precisely controlled and that move via paramecium-like ciliary motion.
Professor Choi’s research team succeeded in fabricating the world’s first ciliary microrobots utilizing ultra-fine three-dimensional processing technology and asymmetric magnetic drive technology by applying microorganism’s ciliary movement, which thus far had only been theorized but never put into practice.
Microfluidic environments in which microorganisms move include highly viscous environments like the human body’s internal fluids; thus, in a macro environment, it is difficult to create propulsion with swimming-based mechanisms such as inertia-based symmetrical rowing like that used by large animals such as humans. As such, microorganisms moving in highly-viscous environments utilize various other propulsion techniques such as spiral drive motion, progressive wave motion, ciliary asymmetric reciprocating motion, and the like.
Microrobots that use propulsion mechanisms such as spiral drive motion and progressive wave motion were first realized and implemented at the Zurich Federal Institute of Technology, Switzerland; University of Twente, Netherlands; and Harvard University, USA. However, the development of microrobots that move utilizing ciliary motion has thus far been absent due to the difficulty of producing a microstructure with a large number of cilia as well as with asymmetrical drive.
Professor Choi’s research team has produced a ciliary microrobot with nickel and titanium coating on top of photo-curable polymer material, using three-dimensional laser process technology and precise metal coating techniques.
In addition, the team verified that the speed and propulsion efficiency of their newly-developed microrobots were much higher than those of existing conventional microrobots moving under magnetic attraction drive after measuring the ciliary microrobots’ movement utilizing asymmetrical magnetic actuation technology.

a) Screen capture of linear motion of ciliary microrobots according to reciprocating magnetic drive under magnetic field control
b) Screen capture of rotary motion of ciliary microrobots according to reciprocating magnetic axis rotation under magnetic field control
c) The movement of ciliary microrobots tracing the letters D. G. I. S. T.
The maximum speed of ciliary microrobots with a length of 220 micrometers and a height of 60 micrometers is 340 micrometers per second, thus they can move at least 8.6 times faster and as much as 25.8 times faster than conventional microrobots moving under magnetic attraction drive.
In comparison to previously developed microrobots, Professor Choi’s ciliary microrobots are expected to deliver higher amounts of chemicals and cells to target areas in the highly viscous body environment thanks to their ability to freely change direction and to move in an 80 micrometer-diameter sphere to the target point shown in the experiment using the magnetic field.
Professor Choi from DGIST’s Department of Robotics Engineering said, “With precise three-dimensional fabrication techniques and magnetic control technology, my team has developed microrobots mimicking cilia’s asymmetric reciprocation movement, which has been never realized so far. We’ll continually strive to study and experiment on microrobots that can efficiently move and operate in the human body, so that they can be utilized in chemical and cell delivery as well as in non-invasive surgery.”
Learn more: Prof. Hongsoo Choi’s Research Team Develops World’s First Ciliary Stroke Motion Microrobots
The Latest on: Ciliary microrobots
[google_news title=”” keyword=”ciliary microrobots” num_posts=”10″ blurb_length=”0″ show_thumb=”left”]
via Google News
The Latest on: Ciliary microrobots
- Potential modifier gene identified as cause of ciliary pathology in retinitis pigmentosa patienton April 18, 2024 at 5:00 pm
There is a high degree of ciliary specialization, ranging from motile cilia of the respiratory epithelium to primary cilia—necessary for neurodevelopment or the formation of many organs—and ...
- Rechargeable nanotorchon April 14, 2024 at 5:00 pm
This allows the routes taken through the body by microrobots to be tracked in real time. In addition, it can be “recharged” non-invasively with near-infrared (NIR) light in a non-contact manner.
- Seaweed microbots could one day treat cancer, researcher sayson April 10, 2024 at 5:00 pm
STORY: These little green dots are microrobots. They can navigate in a cell network and stimulate individual cells in a targeted manner. Researchers at the Technical University of Munich – or ...
- Turning microalgae into light-controlled, soft bio-microrobotson April 4, 2024 at 8:03 am
However, it is still a big challenge to maneuver rigid microrobots in complicated and sinuous narrow spaces (such as blood vessels and intestines) due to their inability to deform. Developing ...
- 'Smart swarms' of tiny robots inspired by natural herd mentalityon April 2, 2024 at 4:59 pm
This finding builds on a novel optical feedback system – the ability to direct these microrobots in a collective way using controllable light patterns. This system was first unveiled in the ...
- Nano-robots revolutionize medicineon April 1, 2024 at 5:00 pm
Robots are becoming smaller and are changing the medical field in new ways. They’re called microbots or nano-robots, and they’re so small that thousands of them could fit in a single pill that ...
- Magnetic microrobots: A new tool to fight against liver canceron February 15, 2024 at 3:10 am
"First of all, using artificial intelligence, we need to optimize real-time navigation of the microrobots by detecting their location in the liver and the occurrence of blockages in the hepatic ...
- Bladder Disorders Newson November 15, 2023 at 4:00 pm
Nov. 8, 2023 — A new study reveals that numerous bacterial strains are capable of hiding in the human bladder wall, suggesting why urinary tract infections often ...
- A healthier future with miniature robotson October 18, 2021 at 1:07 pm
Their proposal allows for safe, precise and rapid passage across bio-barriers and tissues to push the frontiers of medical microrobots, according to Li Zhang, the project lead from CUHK Faculty of ...
via Bing News
{kind=link}