






New algorithm could enable household robots to better identify objects in cluttered environments.
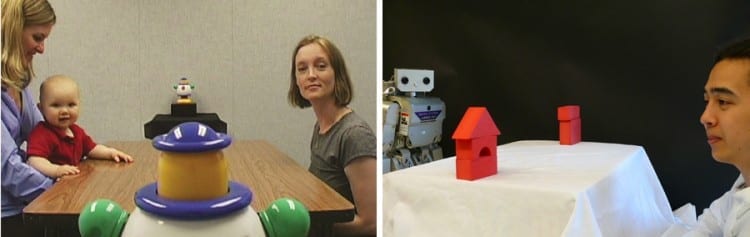
Researchers at MIT’s Computer Science and Artificial Intelligence Laboratory believe that household robots should take advantage of their mobility and their relatively static environments to make object recognition easier, by imaging objects from multiple perspectives before making judgments about their identity. Matching up the objects depicted in the different images, however, poses its own computational challenges.
In a paper appearing in a forthcoming issue of the International Journal of Robotics Research, the MIT researchers show that a system using an off-the-shelf algorithm to aggregate different perspectives can recognize four times as many objects as one that uses a single perspective, while reducing the number of misidentifications.
They then present a new algorithm that is just as accurate but that, in some cases, is 10 times as fast, making it much more practical for real-time deployment with household robots.
“If you just took the output of looking at it from one viewpoint, there’s a lot of stuff that might be missing, or it might be the angle of illumination or something blocking the object that causes a systematic error in the detector,” says Lawson Wong, a graduate student in electrical engineering and computer science and lead author on the new paper. “One way around that is just to move around and go to a different viewpoint.”
First stab
Wong and his thesis advisors — Leslie Kaelbling, the Panasonic Professor of Computer Science and Engineering, and Tomás Lozano-Pérez, the School of Engineering Professor of Teaching Excellence — considered scenarios in which they had 20 to 30 different images of household objects clustered together on a table. In several of the scenarios, the clusters included multiple instances of the same object, closely packed together, which makes the task of matching different perspectives more difficult.
Read more: Vision system for household robots
The Latest on: Household robots
[google_news title=”” keyword=”Household robots” num_posts=”10″ blurb_length=”0″ show_thumb=”left”]
via Google News
The Latest on: Household robots
- Elon Musk Keeps Talking About the Future of Robotics With Optimus, but This Phenomenal Growth Stock Has Already Been Using Robots in Restaurants for Over a Year.on May 1, 2024 at 4:45 am
Elon Musk Keeps Talking About the Future of Robotics With Optimus, but This Phenomenal Growth Stock Has Already Been Using Robots in Restaurants for Over a Year.
- Chinese startup demonstrates robot that could do your choreson April 30, 2024 at 5:34 am
A sleek new video shows a humanoid robot called Astribot S1 uncorking a bottle of wine, flipping toast in a pan, and then ironing – and folding – a t-shirt.
- New Chinese AI Robot: Astribot S1 Can Perform Household Choreson April 29, 2024 at 3:57 pm
Shenzhen-based tech startup Stardust Intelligence has made waves in the robotics industry with the release of its latest innovation: Astribot S1. This AI robot has blended advanced artificial ...
- ‘I have arrived’: Israel unveils headless humanoid robot Menteeboton April 23, 2024 at 7:51 am
Israel’s Mentee Robotics has just unveiled its artificial intelligence (AI)-enabled household chore robot, Menteebot. After two years of research and development, the new robot certainly looks ...
- The robots built to take over boring household taskson April 16, 2024 at 6:49 am
Recent advances in AI and robotics could make it a reality with machines such as the Tesla Optimus and Dobb-E.
- MIT Technology Reviewon April 10, 2024 at 5:00 pm
Human volunteers can use this system to film themselves doing household chores, mimicking the robot’s view of the end of its robotic arm. Using this stand-in for Stretch’s robotic arm and an ...
- Apple's 'next big thing' are home robots?on April 3, 2024 at 5:00 pm
Apple is currently working on a venture into household robots, which might become the company's "next big thing" after the Vision Pro headset and having abandoned its decades-long effort to ...
- Goodbye Apple Car, Hello Apple Home Robotson April 3, 2024 at 5:00 pm
Fresh off dumping its electric vehicles project, Apple appears to be pivoting to something fairly different: household robots. Engineers at the iPhone company have been working on some sort of ...
- ‘Yell at your robot’ technique teaches robots household choreson March 31, 2024 at 5:00 pm
A robot can learn how to correctly wash dishes or pack a bag of trail mix by listening to human voice commands. That could pave the way for future workplace or household robots capable of learning ...
- Everyday robots: A household robo-butler might not be as far off as you thinkon August 13, 2023 at 4:59 pm
Prosper Robotics on the other hand wants to build a genuine robo-butler in the same vein as the Mister Handy robots from the Fallout video game series. According to the company, the household ...
via Bing News

{kind=link}