





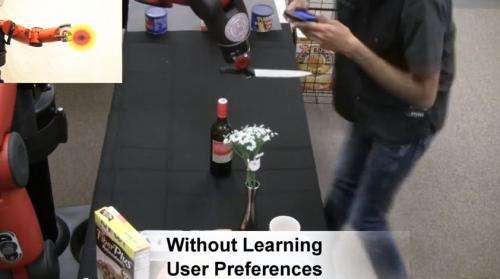
“The robot can learn from corrective human feedback in order to plan its actions that are suitable to the environment and the objects present.”
Cornell University engineers have taught a robot to work in a mock-supermarket checkout line, modifying a Baxter robot from Rethink Robotics in Boston to “coactively learn” from humans and make adjustments while an action is in progress.
“We give the robot a lot of flexibility in learning,” said Ashutosh Saxena, assistant professor of computer science. “The robot can learn from corrective human feedback in order to plan its actions that are suitable to the environment and the objects present.”
Saxena’s research team will report their work at the Neural Information Processing Systems conference in Lake Tahoe, Calif., Dec. 5-8.
Modern industrial robots, like those on automobile assembly lines, have no brains, just memory. An operator programs the robot to move through the desired action; the robot can then repeat the exact same action every time an object goes by.
But off the assembly line, things get complicated: A personal robot working in a home has to handle tomatoes more gently than canned goods. If it needs to pick up and use a sharp kitchen knife, it should be smart enough to keep the blade away from humans.
The Baxter’s arms have two elbows and a rotating wrist, so it’s not always obvious to a human operator how best to move the arms to accomplish a particular task. So Saxena and graduate student Ashesh Jain drew on previous work, adding programming that lets the robot plan its own motions. It displays three possible trajectories on a touch screen where the operator can select the one that looks best.
Then humans can give corrective feedback. As the robot executes its movements, the operator can intervene, manually guiding the arms to fine-tune the trajectory. The robot has what the researchers call a “zero-G” mode, where the robot’s arms hold their position against gravity but allow the operator to move them. The first correction may not be the best one, but it may be slightly better. The learning algorithm the researchers provided allows the robot to learn incrementally, refining its trajectory a little more each time the human operator makes adjustments or selects a trajectory on the touch screen. Even with weak but incrementally correct feedback from the user, the robot arrives at an optimal movement.
Go deeper with Bing News on:
Flexibility in learning
- Ontario to ban use of cellphones in school classrooms starting in September
Ontario is introducing a suite of measures that will crack down on cellphone use and vaping in school. The new rules will go into affect in the 2024-2025 school year. As of September, students in ...
- Summertime and learning is easy (and affordable!
As the semester winds down, many students are already dreaming of lazy summer days. But hold on a minute! Summer can be a fantastic time to not only relax but also to make significant progress toward ...
- New law gives schools, students much needed flexibility
There has been public concern about a new bill that would allow Pennsylvania schools to move to four-day weeks, with some worried about the impact on working parents. Those concerns are valid — child ...
- Ubiros Gentle grippers go all electric for reliability, flexibility
Ubiros has developed grippers with force-sensing capabilities to bring automation to more picking tasks, explains President Onder Ondemir.
- Clover Hill Early Learning Center earned 5-star rating from state
The state of Ohio has awarded Clover Hill Early Learning Center (CHELC) with a 5-Star rating under the Step Up to Quality (SUTQ) system. This award was given ...
Go deeper with Google Headlines on:
Flexibility in learning
[google_news title=”” keyword=”flexibility in learning” num_posts=”5″ blurb_length=”0″ show_thumb=”left”]
Go deeper with Bing News on:
Coactive Learning
- The Learning Network
By The Learning Network We invite students to write public-facing letters to people or groups about issues that matter to them. Contest dates: March 13 to May 1. By The Learning Network Film ...
- Film Club
What are the unsung jobs that make the world a better — and tastier — place? By The Learning Network There is a public and political push to criminalize homelessness. Is it the wrong ...
- Learning Communities
Through learning communities, you have a great opportunity to connect with other students who share your interests and get to know faculty. Students who participate in a learning community earn higher ...
- Best language learning app of 2024
Instead, head to Google Play or the App Store. There are many language learning apps on the market, and each one tends to focus on different techniques to get the job done. The best language ...
- University Learning Center
The University Learning Center (ULC) is dedicated to providing academic support to The New School’s diverse student population through one-on-one tutoring sessions, workshops, and more. Our primary ...
Go deeper with Google Headlines on:
Coactive Learning
[google_news title=”” keyword=”Coactive Learning” num_posts=”5″ blurb_length=”0″ show_thumb=”left”]

{kind=link}