





Football-size robot can skim discreetly along a ship’s hull to seek hollow compartments concealing contraband
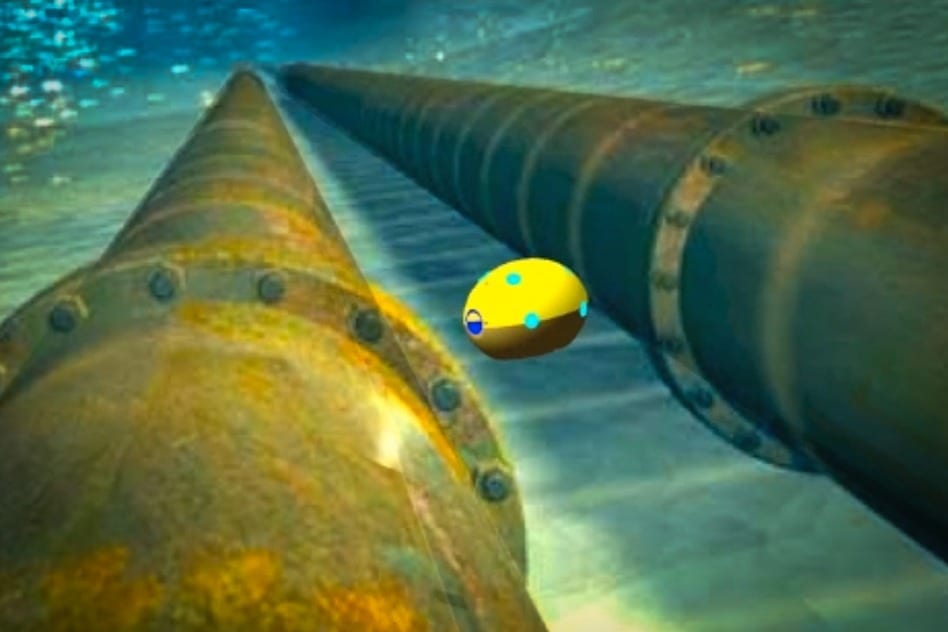
Last week, at the International Conference on Intelligent Robots and Systems, MIT researchers unveiled an oval-shaped submersible robot, a little smaller than a football, with a flattened panel on one side that it can slide along an underwater surface to perform ultrasound scans.
Originally designed to look for cracks in nuclear reactors’ water tanks, the robot could also inspect ships for the false hulls and propeller shafts that smugglers frequently use to hide contraband. Because of its small size and unique propulsion mechanism — which leaves no visible wake — the robots could, in theory, be concealed in clumps of algae or other camouflage. Fleets of them could swarm over ships at port without alerting smugglers and giving them the chance to jettison their cargo.
“It’s very expensive for port security to use traditional robots for every small boat coming into the port,” says Sampriti Bhattacharyya, a graduate student in mechanical engineering, who designed the robot together with her advisor, Ford Professor of Engineering Harry Asada. “If this is cheap enough — if I can get this out for $600, say — why not just have 20 of them doing collaborative inspection? And if it breaks, it’s not a big deal. It’s very easy to make.”
Indeed, Bhattacharyya built the main structural components of the robot using a 3-D printer in Asada’s lab. Half of the robot — the half with the flattened panel — is waterproof and houses the electronics. The other half is permeable and houses the propulsion system, which consists of six pumps that expel water through rubber tubes.
Two of those tubes vent on the side of the robot opposite the flattened panel, so they can keep it pressed against whatever surface the robot is inspecting. The other four tubes vent in pairs at opposite ends of the robot’s long axis and control its locomotion.
The Latest on: Underwater robot
[google_news title=”” keyword=”Underwater robot” num_posts=”10″ blurb_length=”0″ show_thumb=”left”]
via Google News

The Latest on: Underwater robot
- Team from Bannari Amman institute bags second prize in underwater robotics challengeon April 27, 2024 at 6:38 am
Bannari Amman Institute of Technology students win second place in Singapore Autonomous Underwater Vehicle Challenge 2024.
- Cedarville senior, team builds underwater roboton April 26, 2024 at 7:12 am
This was a very lofty capstone idea, one that would be difficult to accomplish because other college students from previous years had attempted to make an underwater robot with ...
- RICE develops new underwater robot with a buoyancy control system using fuel cellson April 26, 2024 at 4:31 am
Rice University students have made a breakthrough in underwater robotics by creating a remotely operated vehicle (ROV) that utilizes water-splitting fuel cells for buoyancy control. This innovative ...
- Underwater robot pioneers new energy-efficient buoyancy controlon April 25, 2024 at 11:16 am
A remotely operated underwater robot built by a team of Rice University engineering students pioneers a new way to control buoyancy via water-splitting fuel cells. The device, designed and constructed ...
- Underwater robot pioneers new energy-efficient buoyancy controlon April 24, 2024 at 5:00 pm
HOUSTON – (April 25, 2024) – A remotely operated underwater robot built by a team of Rice University engineering students pioneers a new way to control buoyancy via water-splitting fuel cells.
- These supersized clownfish robots could be coming to waterways in the Middle Easton April 22, 2024 at 4:28 am
The world’s water resources are under mounting pressure. A startup called Aquaai wants to use fishlike underwater drones to help the protect them.
- Penguin-Inspired Underwater Drone Gets a Boost: New Quadroin Offers Enhanced Performanceon April 19, 2024 at 5:45 pm
EvoLogics has introduced an enhanced version of the penguin-inspired Quadroin AUV, improving its functionality for more efficient marine exploration and monitoring.
- Video: Bio-inspired aquatic robot shoots through the water like a penguinon April 18, 2024 at 11:21 am
Penguins are fast, fantastic swimmers, so why not make an underwater robot inspired by them? That's just what German underwater tech company EvoLogics has done, with its new-and-improved Quadroin AUV ...
- Sabina student helps build underwater roboton April 18, 2024 at 10:55 am
CEDARVILLE — Christopher Tooill, a Cedarville University student from Sabina, recently helped build an underwater robot.
- Video: Multi-talented underwater robot uses fins to swim, walk and crawlon April 15, 2024 at 12:35 pm
A new underwater robot can swim through the water with fins, and walk or crawl along the bottom when necessary. These capabilities could really give it a leg up – pun fully intended – at outperforming ...
via Bing News

{kind=link}