





Scientists have developed robots with a new sense — lateral line sensing.
All fish have this sensing organ but so far it had no technological counterpart on human-made underwater vehicles.
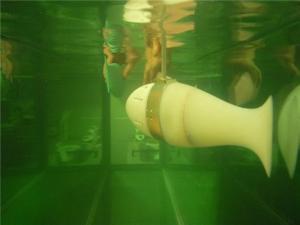
In an article published in Proceedings of the Royal Society A, researchers describe a robotic fish that is controlled with the help of lateral line sensors.
During the last 4 years, the EU funded European research project FILOSE has investigated fish lateral line sensing and locomotion with the aims of understanding how fish detect and exploit flow features, and of developing efficient underwater robots based on biological principles.
Though flow is a highly volatile and unsteady state of matter, it can nonetheless be measured and characterized based on many salient features that do not change much in space and time (such as flow direction or turbulence intensity, for example). These salient features can then be described as a “flowscape” — a flow landscape that helps fish and robots to orient themselves, navigate and control their movements.
“So far flow in robotics is treated as a disturbance that drives the robots away from their planned course,” says Prof. Maarja Kruusmaa, the Scientific Coordinator of the FILOSE project. “We have shown that flow is also a source of information that can be exploited to better control the vehicle. Also, flow can be a source of energy if we can understand the flow dynamics and interact with eddies and currents in a clever way.”
Experiments with flow sensing and actuation in FILOSE have demonstrated that a fish robot can save energy by finding energetically favorable regions in the flow where the currents are weaker or by interacting with eddies so that they help to push the robot forward. The robots are also able to detect flow direction and swim upstream or hold station in the flow while compensating for the downstream drift by measuring the flow speed. FILOSE robot hovering in the wake of an object in the flow is demonstrated to reduce its energy consumption. “It is similar to reducing your effort in the tailwind of another cyclist or reducing the fuel consumption of your car by driving behind a truck,” Prof. Kruusmaa says.

Several prototype artificial lateral lines and robot actuators were developed in FILOSE to experimentally investigate different aspects of sensing and locomotion in fluids, such as how to use compliant materials to efficiently swim in turbulence, how to build robots that are mechanically simple but still behave like fish, how to interpret flow features and use them for controlling the vehicles, and how to measure robot’s own motion from the flow signals.
The Latest Bing News on:
Robotic Fish
- What is the relation between fish and fatty liver disease?on April 27, 2024 at 7:31 pm
Metabolic Dysfunction-associated Steatotic Liver Disease (MASLD) results from various factors including diet, lack of exercise, genetics, and moderate ...
- Save $400 on Samsung’s new AI-powered robot vacuumon April 27, 2024 at 1:05 pm
Grab a super powerful and intelligent robot vacuum from Samsung for $400 off and have the cleanest home possible for less.
- What's in your seawater? Aquaai's robotic fish have the answerson April 27, 2024 at 12:23 am
Aquaai's robots look like fish and swim like fish, but they also carry a payload of cameras and sensors that the company says could hold the key to providing better data on the health of oceans, ...
- Researchers Unveil Automated Embryo Injection Technology with Broad Applicationson April 26, 2024 at 10:50 am
technology could be used not merely as a tool in genetic experiments but also as an aid in avoiding the extinction of many species through cryopreservation, a methodology whose effectiveness has been ...
- Umami-rich scrap fish and invasive species can liven up vegetables, says gastrophysiciston April 26, 2024 at 10:45 am
Greening the way we eat needn't mean going vegetarian. A healthy, more realistic solution is to adopt a flexitarian diet where seafoods add umami to "boring" vegetables. University of Copenhagen ...
- Ubiros Gentle grippers go all electric for reliability, flexibilityon April 26, 2024 at 10:38 am
Ubiros has developed grippers with force-sensing capabilities to bring automation to more picking tasks, explains President Onder Ondemir.
- RICE develops new underwater robot with a buoyancy control system using fuel cellson April 26, 2024 at 4:31 am
Traditional AUVs rely on thrusters or pumps to adjust depth, which consumes considerable energy and generates noise.
- Reuters Science News Summaryon April 25, 2024 at 9:59 pm
The company, Beijing Xinzhida Neurotechnology, developed a brain-computer interface (BCI) implant, called Neucyber, that has been tested on a monkey, allowing it control a robotic arm with only its ...
- This Wi-Fi robot vacuum is discounted from $199 to $79on April 22, 2024 at 4:45 am
The iHome AutoVac Juno Robot Vacuum is an incredibly cheap robot vacuum which has many of the key benefits you need. It's on sale right now.
- The 6 best robot lawn mowers in 2024 are here to make your Roomba jealouson April 18, 2024 at 3:46 pm
Promotions are subject to availability and retailer terms. The best robot lawn mowers are also surprisingly simple to operate. They're even smart enough to avoid obstacles in or around your lawn.
The Latest Google Headlines on:
Robotic Fish
[google_news title=”” keyword=”Robotic Fish” num_posts=”10″ blurb_length=”0″ show_thumb=”left”] [/vc_column_text]The Latest Bing News on:
Robot sensing
- Forcen closes funding to develop ‘superhuman’ robotic manipulationon April 28, 2024 at 5:31 am
Founded in 2015, Forcen said its goal is to enable businesses to easily deploy “ (super)human” robotic manipulation in complex and unstructured applications. The company added that its technology is ...
- Save $400 on Samsung’s new AI-powered robot vacuumon April 27, 2024 at 1:05 pm
Grab a super powerful and intelligent robot vacuum from Samsung for $400 off and have the cleanest home possible for less.The Latest Tech News, Delivered to Your Inbox ...
- You can buy this flame-throwing robot dog for less than $10,000on April 27, 2024 at 12:10 pm
A flame-throwing robot dog is now available to purchase for under $10,000, and it's actually legal in 48 states.
- China unveils “Tiangong”: First fully electric humanoid robot capable of running at 6 km/hon April 27, 2024 at 5:10 am
China's Beijing Humanoid Robot Innovation Center unveils "Tiangong," a robot capable of human-like running at 6 km/h.
- Robots cannot outrun animals, but they're evolving fasteron April 26, 2024 at 11:30 am
Despite these efforts, today's robots still cannot match the natural abilities of many animals in terms of endurance ...
- Underwater robot pioneers new energy-efficient buoyancy controlon April 25, 2024 at 11:17 am
A remotely operated underwater robot built by a team of Rice University engineering students pioneers a new way to control buoyancy via water-splitting fuel cells. The device, designed and constructed ...
- Best Evil Robot You Can Buy: Robosen's Megatron Auto-Transforms via Voice Commandson April 25, 2024 at 9:17 am
The iconic Transformers villain comes to life in a self-converting robot that turns into a tank. It's a killer toy.
- Why can't robots outrun animals?on April 24, 2024 at 11:00 am
Robotics engineers have worked for decades and invested many millions of research dollars in attempts to create a robot that can walk or run as well as an animal. And yet, it remains the case that ...
- Why animals run faster than their robot doppelgängers… for nowon April 24, 2024 at 11:00 am
“It [advances in robots] will move faster, because evolution is undirected,” University of Washington Department of Electrical & Computer Engineering Associate Professor Sam Burden said. “There are ...
- Snag this Roomba robot vacuum while it’s discounted to $180on April 24, 2024 at 6:15 am
The iRobot Roomba 694 robot vacuum is down to a more affordable $180 from Crutchfield, so if you need help in cleaning your floors, you should shop this offer.
The Latest Google Headlines on:
Robot sensing
[google_news title=”” keyword=”robot sensing” num_posts=”10″ blurb_length=”0″ show_thumb=”left”]

{kind=link}