





A robotic arm that can bend, stretch and squeeze through cluttered environments has been created by a group of researchers from Italy.
Inspired by the eight arms of an octopus, the device has been specifically designed for surgical operations to enable surgeons to easily access remote, confined regions of the body and, once there, manipulate soft organs without damaging them.
It is believed the device could reduce the number of instruments – and therefore entry incisions – necessary in surgical operations, with part of the arm being used to manipulate organs while another part of the arm operates.
The device, which has been presented today, Thursday 14 May, in IOP Publishing’s journal Bioinspiration and Biomimetics, holds a key advantage over traditional surgical tools by way of its ability to quickly transform from a bending, flexible instrument into a stiff and rigid one.
Lead author of the study Dr Tommaso Ranzani said: “The human body represents a highly challenging and non-structured environment, where the capabilities of the octopus can provide several advantages with respect to traditional surgical tools.
“Generally, the octopus has no rigid structures and can thus adapt the shape of its body to its environment. Taking advantage of the lack of rigid skeletal support, the eight highly flexible and long arms can twist, change their length, or bend in any direction at any point along the arm.”
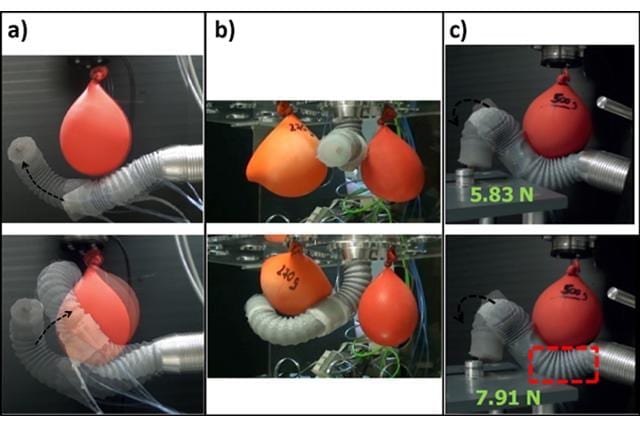
To achieve this effect in the robotic arm, the researchers, from the Sant’Anna School of Advanced Studies in Italy, constructed a device that was made from two interconnecting identical modules.
Each module could be made to move by the inflation of three cylindrical chambers that were equally spaced inside the module. By alternating and combining the inflation of the three chambers, the module could be made to bend and stretch in various directions.
The stiffness of the two modules could also be controlled by exploiting a ‘granular jamming phenomenon’ in which a flexible membrane inside the module is filled with a granular media. When a vacuum is applied to the membrane, its density increases and the whole membrane becomes rigid.
In their study, the researchers performed a number of characterization tests on the robotic device, showing that it could bend to angles of up to 255° and stretch to up to 62% of its initial length. The stiffening mechanism was able to provide stiffness increases from 60% up to 200%.
The ability of the robotic arm to manipulate organs while surgical tasks are performed was successfully demonstrated in simulated scenarios where organs were represented by water-filled balloons.
Read more: Octopus arm inspires future surgical tool

The Latest on: Robotic surgical tool
[google_news title=”” keyword=”Robotic surgical tool” num_posts=”10″ blurb_length=”0″ show_thumb=”left”]
via Google News
The Latest on: Robotic surgical tool
- Cheshire Medical implements its first robotic-assisted surgical systemon April 26, 2024 at 6:30 pm
Cheshire Medical Center in Keene has added a new member to its team — a surgical robot. The Dartmouth Health affiliate began using its da Vinci Xi robotic-assisted surgical platform April 15 to ...
- Soft robotic nerve cuffs could revolutionize treatment of neurological conditionson April 26, 2024 at 5:49 pm
Researchers have developed tiny, flexible devices that can wrap around individual nerve fibres without damaging them.
- Robotic nerve 'cuffs' could help treat a range of neurological conditionson April 25, 2024 at 5:00 pm
Current tools for interfacing with the peripheral nerves -- the 43 pairs of motor and sensory nerves that connect the brain and the spinal cord -- are outdated, bulky and carry a high risk of nerve ...
- Vattikuti Foundation announces KS International Innovation Awards for Robotic Surgeryon April 22, 2024 at 4:27 pm
The robotic surgery champion, Vattikuti Foundation, has announced the 2024 edition of its KS International Innovation Awards in Robotic Surgery.
- Bay Area doctors using Ion robot to detect lung cancer safer, faster than beforeon April 21, 2024 at 10:18 pm
Developed by Sunnyvale-based Intuitive Surgical, the Ion robot can help doctors diagnose lung cancer faster and safer than ever before.
- Hop on the Robotics Rocket: 3 Stocks on Pace to Triple by 2030on April 19, 2024 at 12:13 pm
InvestorPlace - Stock Market News, Stock Advice & Trading Tips Robotics stocks have been making incredible strides, transforming industries ...
- Cheshire Medical Center acquires its first surgical roboton April 18, 2024 at 4:17 pm
Intuitive's da Vinci Xi robotic surgical platform will enable the hospital to perform hundreds of minimally invasive general, bariatric, and gynecological surgeries every year.
- Medtronic unveils new AI for laparoscopic, robotic surgery techon April 18, 2024 at 6:00 am
Medtronic (NYSE: MDT) today announced new AI capabilities to go with the launch of its Touch Surgery Live Stream digital offering.
- Robotics Stocks to Watch in April: 3 Top Picks Poised for Explosive Growthon April 17, 2024 at 2:08 pm
Robotics stocks offer a high-potential frontier, considering the market is expected to grow over 11% between 2024 to 2028. It’s anticipated to eventually land on a total market volume of over $65 ...
- Robot-Assisted Surgery helps 300th patient at Newman Regional Healthon April 17, 2024 at 1:57 pm
The Newman Regional Health surgical team performed their 300th procedure using the da Vinci Xi Robot-Assisted Surgical System on Wednesday, less than two years after its first robotic-assisted surgery ...
via Bing News
{kind=link}