






Courtesy of the researchers
New algorithm lets autonomous robots divvy up assembly tasks on the fly
Today’s industrial robots are remarkably efficient — as long as they’re in a controlled environment where everything is exactly where they expect it to be.
But put them in an unfamiliar setting, where they have to think for themselves, and their efficiency plummets. And the difficulty of on-the-fly motion planning increases exponentially with the number of robots involved. For even a simple collaborative task, a team of, say, three autonomous robots might have to think for several hours to come up with a plan of attack.
This week, at the Institute for Electrical and Electronics Engineers’ International Conference on Robotics and Automation, a group of MIT researchers were nominated for two best-paper awards for a new algorithm that can significantly reduce robot teams’ planning time. The plan the algorithm produces may not be perfectly efficient, but in many cases, the savings in planning time will more than offset the added execution time.
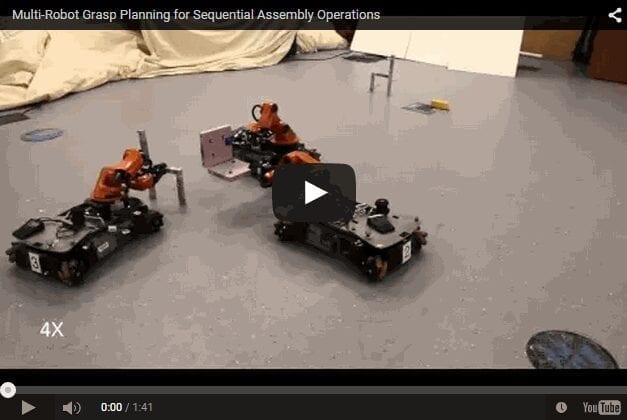
The researchers also tested the viability of their algorithm by using it to guide a crew of three robots in the assembly of a chair.
“We’re really excited about the idea of using robots in more extensive ways in manufacturing,” says Daniela Rus, the Andrew and Erna Viterbi Professor in MIT’s Department of Electrical Engineering and Computer Science, whose group developed the new algorithm. “For this, we need robots that can figure things out for themselves more than current robots do. We see this algorithm as a step in that direction.”
Grasping consequences
The problem the researchers address is one in which a group of robots must perform an assembly operation that has a series of discrete steps, some of which require multirobot collaboration. At the outset, none of the robots knows which parts of the operation it will be assigned: Everything’s determined on the fly.
Computationally, the problem is already complex enough, given that at any stage of the operation, any of the robots could perform any of the actions, and during the collaborative phases, they have to avoid colliding with each other. But what makes planning really time-consuming is determining the optimal way for each robot to grasp each object it’s manipulating, so that it can successfully complete not only the immediate task, but also those that follow it.
“Sometimes, the grasp configuration may be valid for the current step but problematic for the next step because another robot or sensor is needed,” Rus says. “The current grasping formation may not allow room for a new robot or sensor to join the team. So our solution considers a multiple-step assembly operation and optimizes how the robots place themselves in a way that takes into account the entire process, not just the current step.”
The key to the researchers’ algorithm is that it defers its most difficult decisions about grasp position until it’s made all the easier ones. That way, it can be interrupted at any time, and it will still have a workable assembly plan. If it hasn’t had time to compute the optimal solution, the robots may on occasion have to drop and regrasp the objects they’re holding. But in many cases, the extra time that takes will be trivial compared to the time required to compute a comprehensive solution.
Read more: Helping robots put it all together
The Latest on: Collaborating robots
[google_news title=”” keyword=”Collaborating robots” num_posts=”10″ blurb_length=”0″ show_thumb=”left”]
via Google News
The Latest on: Collaborating robots
- A touch of genius. How to make soft and squishy robotson April 28, 2024 at 4:14 am
The major challenge to robots becoming more human-like is the skin and the sense of touch, and responses to it. The complexity of design in creating human-like skin for robots is enormous: ...
- Robots cannot outrun animals, but they’re evolving fasteron April 26, 2024 at 11:30 am
Despite these efforts, today's robots still cannot match the natural abilities of many animals in terms of endurance ...
- Automated machine learning robot unlocks new potential for genetics researchon April 26, 2024 at 9:10 am
University of Minnesota Twin Cities researchers have constructed a robot that uses machine learning to fully automate a complicated microinjection process used in genetic research.
- AI to Power the Next Generation of Robotson April 26, 2024 at 4:22 am
There's increasing buzz that the tech behind ChatGPT will make future industrial and humanoid robots far more capable.
- Europe taps deep learning to make industrial robots safer colleagueson April 26, 2024 at 1:07 am
European researchers have launched the RoboSAPIENS project to make adaptive industrial robots more efficient and safer to work with humans.
- Universal Robots Announces Seamless Integration with Siemens PLCson April 25, 2024 at 9:36 am
The company accelerates its commitment to “Automation for Anyone, Anywhere” by supporting the automation requirements of global companies.
- Universal Robots integrates cobots with Siemens PLCson April 25, 2024 at 6:39 am
Universal Robots says the SRCI is available for its e-Series family of cobots and next-generation robots, the UR20 and UR30.
- Elite Robots to Showcase an Enriched Range of All-in-one Solutions and Collaborative Robots at Automate 2024on April 25, 2024 at 5:01 am
Elite Robots, a leading supplier of collaborative robots, will exhibit its enriched range of cobots and all-in-one solutions at the upcoming Automate Show (May 6-9, Chicago), at booth 4255. This press ...
- Industrial Robots and Their Human Counterpartson April 23, 2024 at 8:35 am
The conversation around robots and their use in manufacturing has long been controversial. Many fear that the introduction of robots into the workplace will displace human jobs. In some respects, yes, ...
- Kassow Robots Launches the KR Pulse Ecosystemon April 22, 2024 at 1:58 pm
With Bosch Rexroth's majority ownership since April 2022, Kassow Robots reinforces its commitment to advancing collaborative robotics and supporting the evolving needs of ...
via Bing News

{kind=link}