





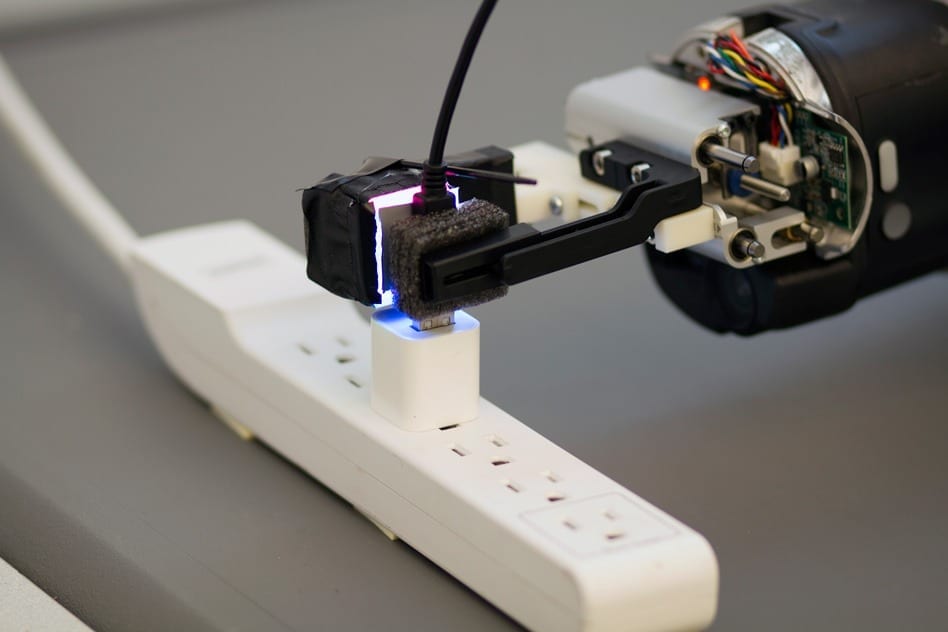
Equipped with a novel optical sensor, a robot grasps a USB plug and inserts it into a USB port.
Researchers at MIT and Northeastern University have equipped a robot with a novel tactile sensor that lets it grasp a USB cable draped freely over a hook and insert it into a USB port.
The sensor is an adaptation of a technology called GelSight, which was developed by the lab of Edward Adelson, the John and Dorothy Wilson Professor of Vision Science at MIT, and first described in 2009. The new sensor isn’t as sensitive as the original GelSight sensor, which could resolve details on the micrometer scale. But it’s smaller — small enough to fit on a robot’s gripper — and its processing algorithm is faster, so it can give the robot feedback in real time.
Industrial robots are capable of remarkable precision when the objects they’re manipulating are perfectly positioned in advance. But according to Robert Platt, an assistant professor of computer science at Northeastern and the research team’s robotics expert, for a robot taking its bearings as it goes, this type of fine-grained manipulation is unprecedented.
“People have been trying to do this for a long time,” Platt says, “and they haven’t succeeded because the sensors they’re using aren’t accurate enough and don’t have enough information to localize the pose of the object that they’re holding.”
The researchers presented their results at the International Conference on Intelligent Robots and Systems this week. The MIT team — which consists of Adelson; first author Rui Li, a PhD student; Wenzhen Yuan, a master’s student; and Mandayam Srinivasan, a senior research scientist in the Department of Mechanical Engineering — designed and built the sensor. Platt’s team at Northeastern, which included Andreas ten Pas and Nathan Roscup, developed the robotic controller and conducted the experiments.
Synesthesia
Whereas most tactile sensors use mechanical measurements to gauge mechanical forces, GelSight uses optics and computer-vision algorithms.
The Latest on: Robotic sensing
[google_news title=”” keyword=”Robotic sensing” num_posts=”10″ blurb_length=”0″ show_thumb=”left”]
via Google News
The Latest on: Robotic sensing
- Top US-based humanoid robotics firm pivots to China-dominated all-electric tech raceon April 28, 2024 at 4:00 am
One of the world’s top robotics companies has announced it will stop developing hydraulic-powered humanoid robots and instead focus on making electric motor-driven robots – a category that Chinese ...
- Save $400 on Samsung’s new AI-powered robot vacuumon April 27, 2024 at 1:05 pm
Grab a super powerful and intelligent robot vacuum from Samsung for $400 off and have the cleanest home possible for less.The Latest Tech News, Delivered to Your Inbox ...
- The robotic arm takes over UAE gas stationson April 27, 2024 at 5:24 am
T he Abu Dhabi National Oil Company introduced the latest innovation. A robotic arm designed to refuel your vehicle at the pump in a few seconds. The arm opens your car’s petrol flap, twists off the ...
- Top 5 Robotic Pool Cleaners for a Sparkling Clean This Summeron April 27, 2024 at 1:08 am
As summer beckons, the allure of a crystal-clear swimming pool becomes irresistible. Yet, the task of maintaining such pristine waters can be daunting without ...
- Robotic welding sets up small-batch manufacturer for future growthon April 26, 2024 at 6:52 am
Dominik Santner, COO at Anton Paar GmbH, said, “The new robotic welding cell represents a huge step towards automation of our manufacturing. If we were to weld our process sensors manually like before ...
- Best Evil Robot You Can Buy: Robosen's Megatron Auto-Transforms via Voice Commandson April 25, 2024 at 9:17 am
The iconic Transformers villain comes to life in a self-converting robot that turns into a tank. It's a killer toy.
- Litter-Robot 4 Vs. 3 Connect: Which Automatic Litter Box Should You Get?on April 25, 2024 at 9:02 am
In short, the Litter-Robot 4 is an upgraded version of the Litter-Robot 3 Connect, with advanced safety sensors, a more sophisticated (and quieter) sifting system and better odor control. I have both ...
- Why animals run faster than their robot doppelgängers… for nowon April 24, 2024 at 11:00 am
“It [advances in robots] will move faster, because evolution is undirected,” University of Washington Department of Electrical & Computer Engineering Associate Professor Sam Burden said. “There are ...
- Snag this Roomba robot vacuum while it’s discounted to $180on April 24, 2024 at 6:15 am
The iRobot Roomba 694 robot vacuum is down to a more affordable $180 from Crutchfield, so if you need help in cleaning your floors, you should shop this offer.
- Bota Systems launches PixONE force-torque sensors for roboticson April 23, 2024 at 10:09 am
Bota Systems says it designed its new PixONE force-torque sensors for ease of integration and to keep cabling inside robotic arms.
via Bing News

{kind=link}