




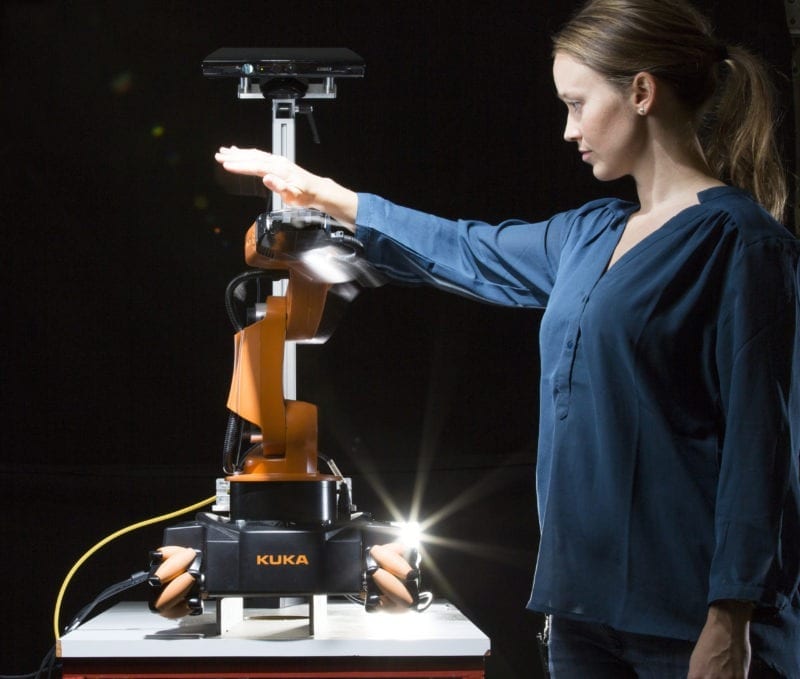

Researchers have developed a robot that adjusts its movements in order to avoid colliding with the people and objects around it. This provides new opportunities for more friendly interaction between people and machines.
Modern industrial robots commonly weigh in at several tonnes and for this reason are placed inside netting enclosures to prevent them colliding with, and causing damage to, the people and objects around them. The drawback is that they are static and perform repetitive tasks entirely separated from their fellow human operators on the same production line.
Working with a machine
If we could forget having to watch out for robot arms colliding with the people and objects around them, their applications could be expanded – with important implications for industrial production.
SINTEF researcher Marianne Bakken tells Gemini about a new ‘hot’ European field of research called ‘collaborative robots’. These machines are equipped with light-duty arms that can more easily be integrated into existing production systems.
“These robots are a few kilos lighter than previous models. They’re safer to work with and shut down gently if they come into contact with a foreign object”, says Bakken. “Today, however, robot arms of this type are blind. To avoid constant collisions, they need to be more intelligent. And this is where we enter the stage. By installing a sensor on the robot, we create a safe machine that can ‘see’. Perhaps this will enable them to work alongside people, instead of being shut away in cages”, she says.
No thinking twice
“It all started with a general requirement to build faster reaction times into robot arm mechanisms”, says Bakken. “Our starting point was to try to help the robot ‘see’ the objects around it”, she says.
This evolved into a four-year, strategic, SINTEF ICT project called SEAMLESS. (http://www.sintef.no/en/projects/seamless-simultaneous-navigation-and-manipulation-/) The researchers obtained funding to investigate the potential of installing a 3D sensor on a robot.
“The sensor detects objects in the space around it, and senses where any given object is located in relation to the robot arm”, says Bakken.
A robot relies on being continuously fed with data so that it can decide in which directions it should be moving. In this case, the sensor generates data that are sent to a PC, where the data are processed and information relayed to the robot arm. The SINTEF researchers have succeeded in speeding up the necessary calculations.
“We’ve managed to obtain updates of the robot’s movements at a rate of ten times a second”, says Bakken. Previously, the movement update calculation took many seconds, by which time the robot might already have collided with something. But now the robot doesn’t need to stop and think twice before it makes its next move.
“By combining fast sensor technology with smart algorithms, we can achieve a uniform and seamless manoeuvre”, says Bakken.
Read more: A friendly robot

The Latest on: Collaborative robots
[google_news title=”” keyword=”Collaborative robots” num_posts=”10″ blurb_length=”0″ show_thumb=”left”]
via Google News
The Latest on: Collaborative robots
- Autonomous agtech robotics startup nabs funding as it gears up for expansionon May 1, 2024 at 10:10 am
FarmWise has been focused on serving farmers in California and Arizona and is gearing up to expand into more regions across the U.S.
- A Roundup of New Robotson May 1, 2024 at 6:16 am
The cups are available in four diameters, from 40 to 100 millimeters, and three mounting configurations (3/8G male or female and 32 millimeter square). All are made from thermoplastic polyurethane for ...
- Absolute Robot Grips New Role as Custom Automation Integratoron April 30, 2024 at 10:46 pm
“This year at NPE, we are showing off the full bandwidth of our capabilities as a custom integrator.” That’s the mission statement for this week in Orlando, states Tim Lavigne, business unit manager ...
- Collaborative Robot Market Size, Share, Industry Growth & Analysis, 2029on April 30, 2024 at 5:00 pm
Chicago, April 30, 2024 (GLOBE NEWSWIRE) -- The Collaborative Robot market Size is projected to grow from USD 1.9 billion in 2024 and is projected to reach USD 11.8 billion by 2030; it is expected to ...
- Yokogawa launches robot operations for onsite safety and efficiencyon April 30, 2024 at 11:43 am
OpreX Robot Management Core integrates management of various robots that perform maintenance tasks usually carried out by humans ...
- Elmo Motion Control to show innovations at 2024 Robotics Summiton April 30, 2024 at 5:00 am
Elmo Motion Control will show off its Platinum Bassoon servo drive at the Robotics Summit & Expo and other events.
- Proco Machinery showcases cobots and AGV robots at NPE 2024on April 30, 2024 at 4:00 am
Proco Machinery booth (#S15097) will showcase collaborative robots (Cobots) and mobile Autonomous Guided Vehicle (AGV) robots work together to modify the packing and unpacking process with speed, ...
- Global Collaborative Robot Industry Research 2024-2030: Growing Focus of Automation Experts to Integrate Robotic Arms with AMRs or AGVson April 29, 2024 at 8:04 am
The report will help the market leaders/new entrants in this market with information on the closest approximations of the revenue numbers for the overall Collaborative Robot market and the subsegments ...
- Female robotics founders discuss their journeys in the industryon April 29, 2024 at 5:00 am
We spoke to the founders of Adagy Robotics and the founders of Diligent Robotics about their experiences within the industry.
- AI to Power the Next Generation of Robotson April 26, 2024 at 4:22 am
There's increasing buzz that the tech behind ChatGPT will make future industrial and humanoid robots far more capable.
via Bing News

{kind=link}