Today’s Discoveries
About Us
Dark
Light
Follow
Now
Week
Month
Today’s Discoveries
About Us
Dark
Light
Follow
Now
Week
Month
Subscribe
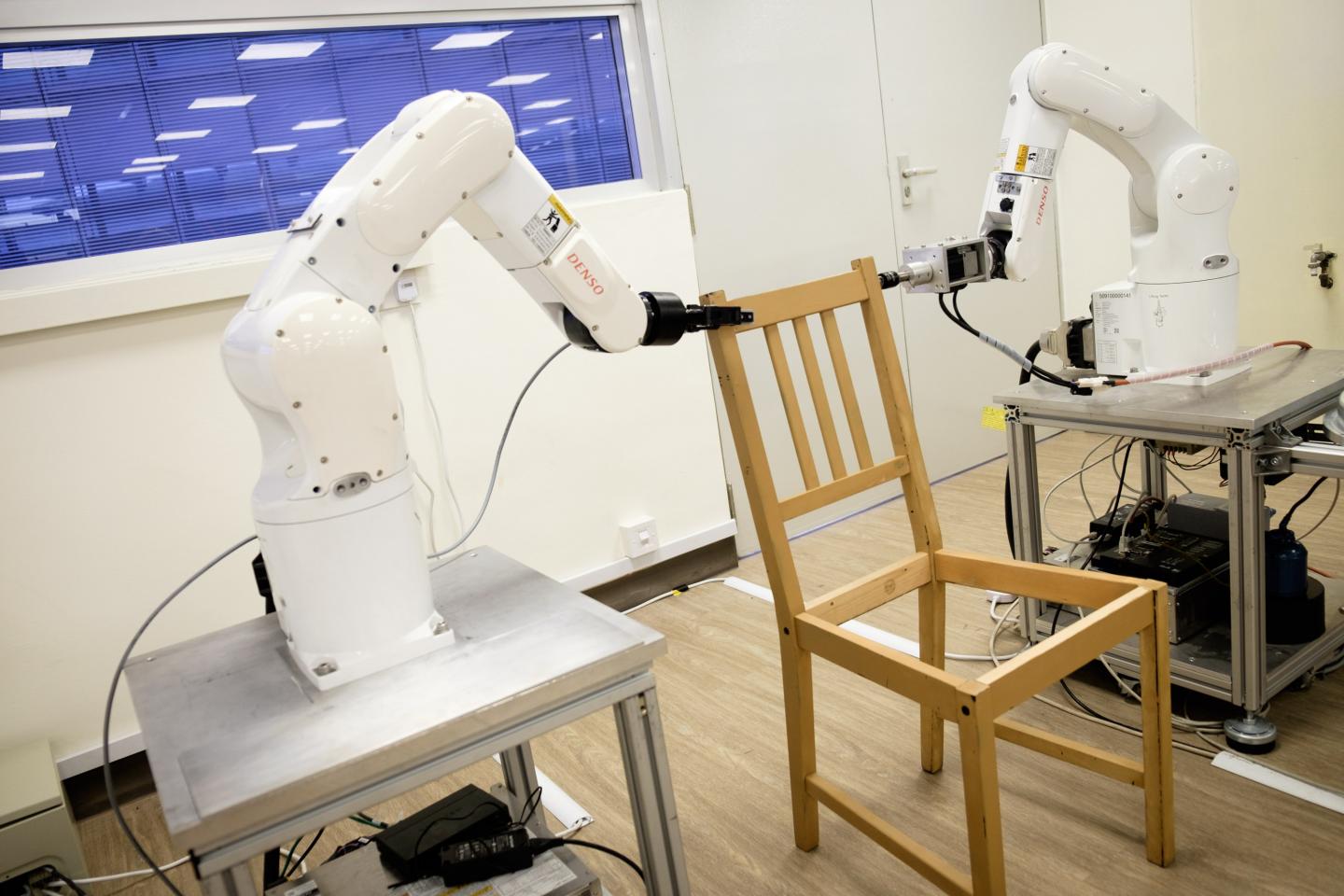
autonomous dexterous manipulation
First robot that can assemble an IKEA chair without interruption
Scroll To Top
Today’s Discoveries
About Us
ABOUT ISSUE
SUBSCRIPTION SERVICES
NEWSLETTER SIGN UP
AUTHORS
CONTACT
Dark
Light